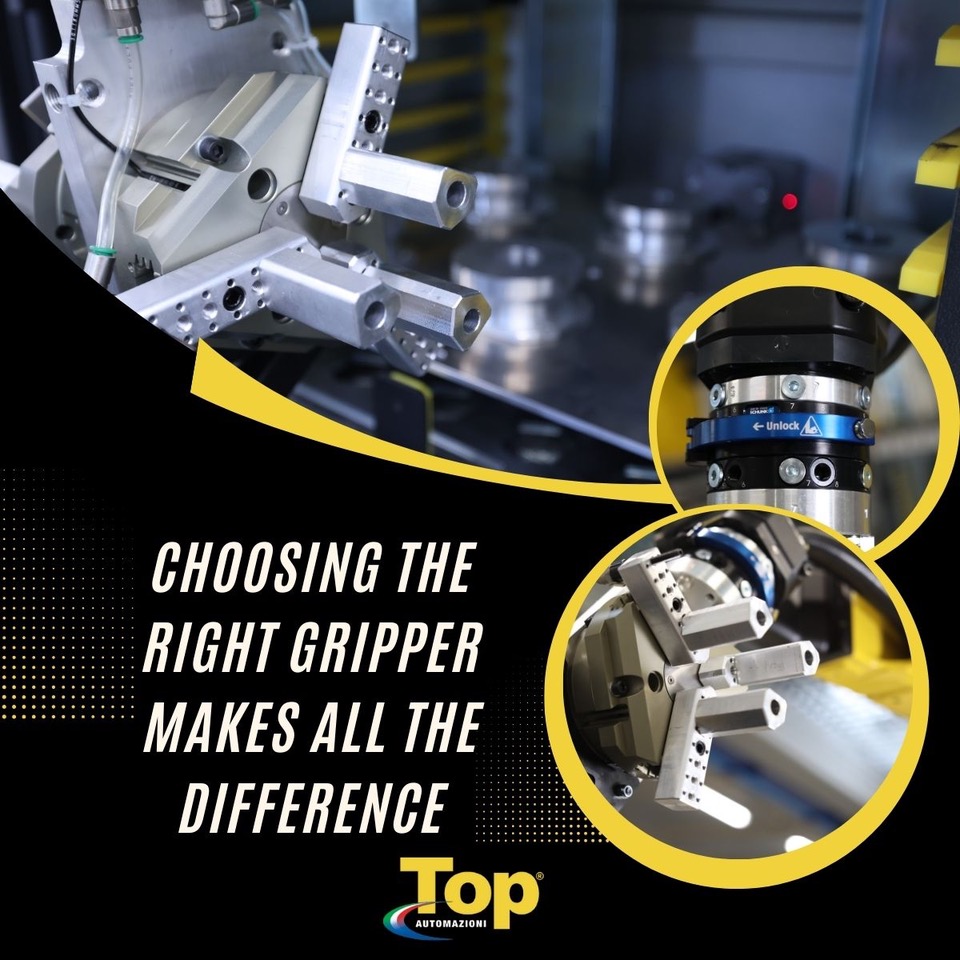

Choosing the Right Gripper Makes All the Difference
Our range of Robot Stand Alone models, Arm, Rolling, and Stone, are equipped with various types of grippers. These grippers are essential for ensuring maximum efficiency and precision when handling parts. Each gripper is designed to meet specific production needs and adapt perfectly to different component geometries, thereby improving the robot’s overall performance by working quickly and safely.
Based on a client’s specific loading and unloading requirements, Top Automazioni engineers determine:
- The correct size
- The clamping force
- The most suitable type
These factors are carefully selected according to the cross-section and shapes of the components to be handled. We also provide a specific study on the most appropriate gripper jaws for each application.
Gripper Types and Technical Characteristics:
- 2 Finger Gripper Suitable for rectangular, square, or similar cross-sections with flat jaws, this gripper is ideal for a stable and secure grip on regular components with defined angles. It’s also suitable for shafts with contoured jaws, allowing for a multi-point grip that reduces flexing and ensures precise part positioning.
- 3 Finger Gripper Suitable for round, cylindrical, hexagonal, or triangular cross-sections, this gripper provides a powerful and uniform hold by applying balanced force at three points. It’s ideal for operations that require holding the part by its head.
- 4 Finger Gripper Suitable for rectangular, square, octagonal, or shaped sections, this gripper allows for two-directional centering. It’s ideal for parts that require precise positioning in the machine, eliminating the need for mechanical stops or references.
- Customized Grippers for specific shapes Custom-designed for components with complex geometries, these grippers provide highly personalized solutions for specific needs.
The jaws can be made of steel, aluminum, or other specific materials and may be coated with anti-scratch materials to preserve the quality of the handled components.
Advanced Features:
- Air Blow System Integrated into the gripper, this system allows for quick and effective cleaning of parts and clamping tools, removing residue and impurities from previous machining processes.
- Quick Change system for gripper This system allows for fast and simple gripper changes, reducing setup times and increasing production flexibility. The manual, quick-release, and self-centering system from the robot’s wrist eliminates the need for further adjustments by the operator.
- Electronic Low Air Pressure Detection This sensor continuously monitors operating pressure, promptly signaling any anomalies and blocking the robotic arm’s movement while generating an alarm to maintain high standards of operational safety.